智能驾驶中的融合定位到底是怎么做的?
我的立场很简单:融合定位不是为了证明某个传感器有多准,而是为了让车持续知道自己在哪,并且知道这次定位靠不靠谱。
我更多是从智能驾驶和泊车工程角度看定位,不是测绘角度。所以我关心的是它能不能稳定服务规划、控制和车位补偿。
融合定位的输入源通常包含什么?
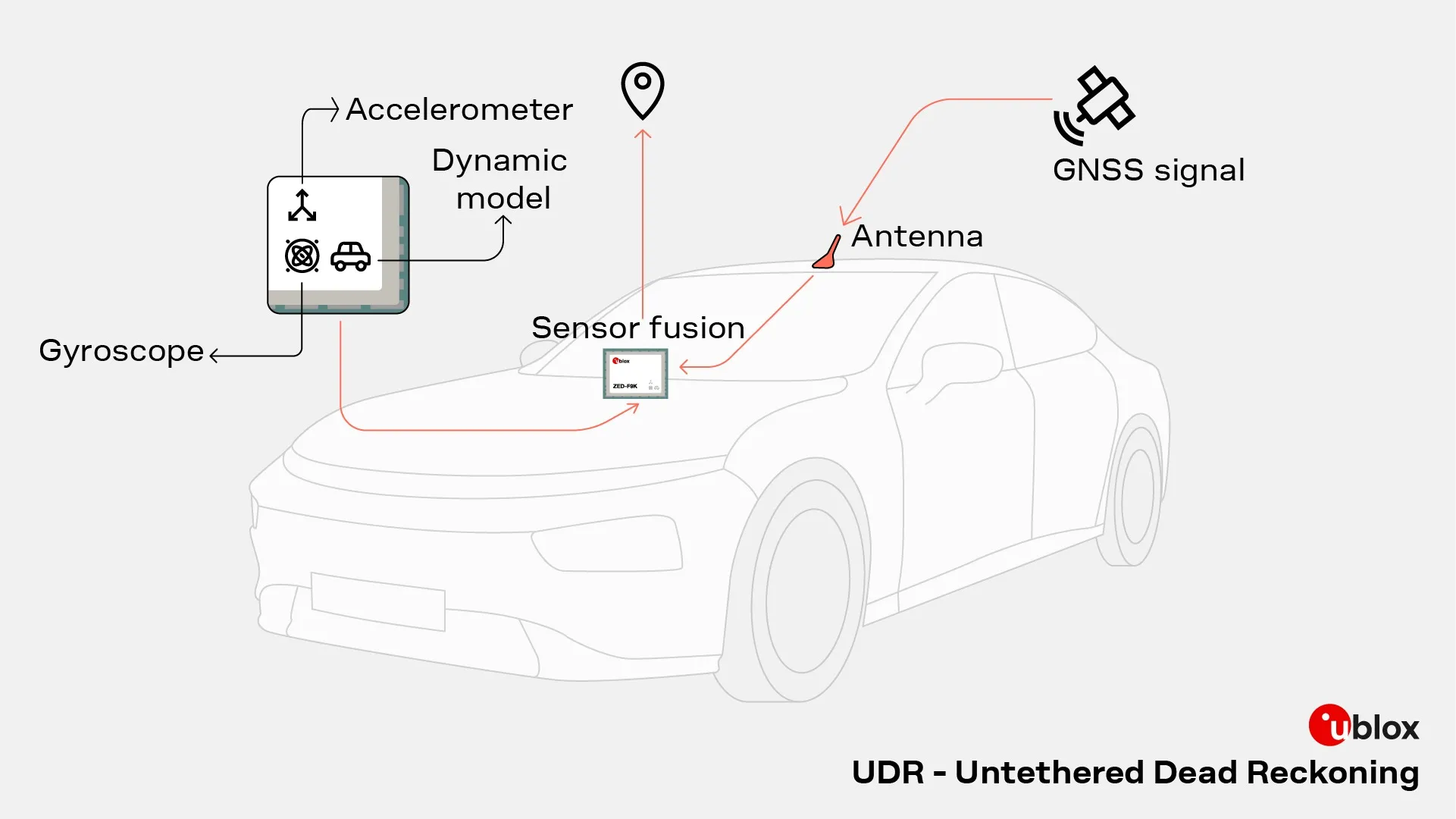
最常见的底座可以先理解成 IMU + 轮速。
IMU 高频、连续,不怕隧道和地库。陀螺仪看车身怎么转,加速度计看车身怎么加速,然后靠积分往前推。但积分一定会漂,时间越长越不可信。
轮速负责把 IMU 拉住。轮子转了多少,车大概走了多少;再结合车辆模型,可以约束车不会无缘无故横着飘。这就是我们常说的 DR,dead reckoning。
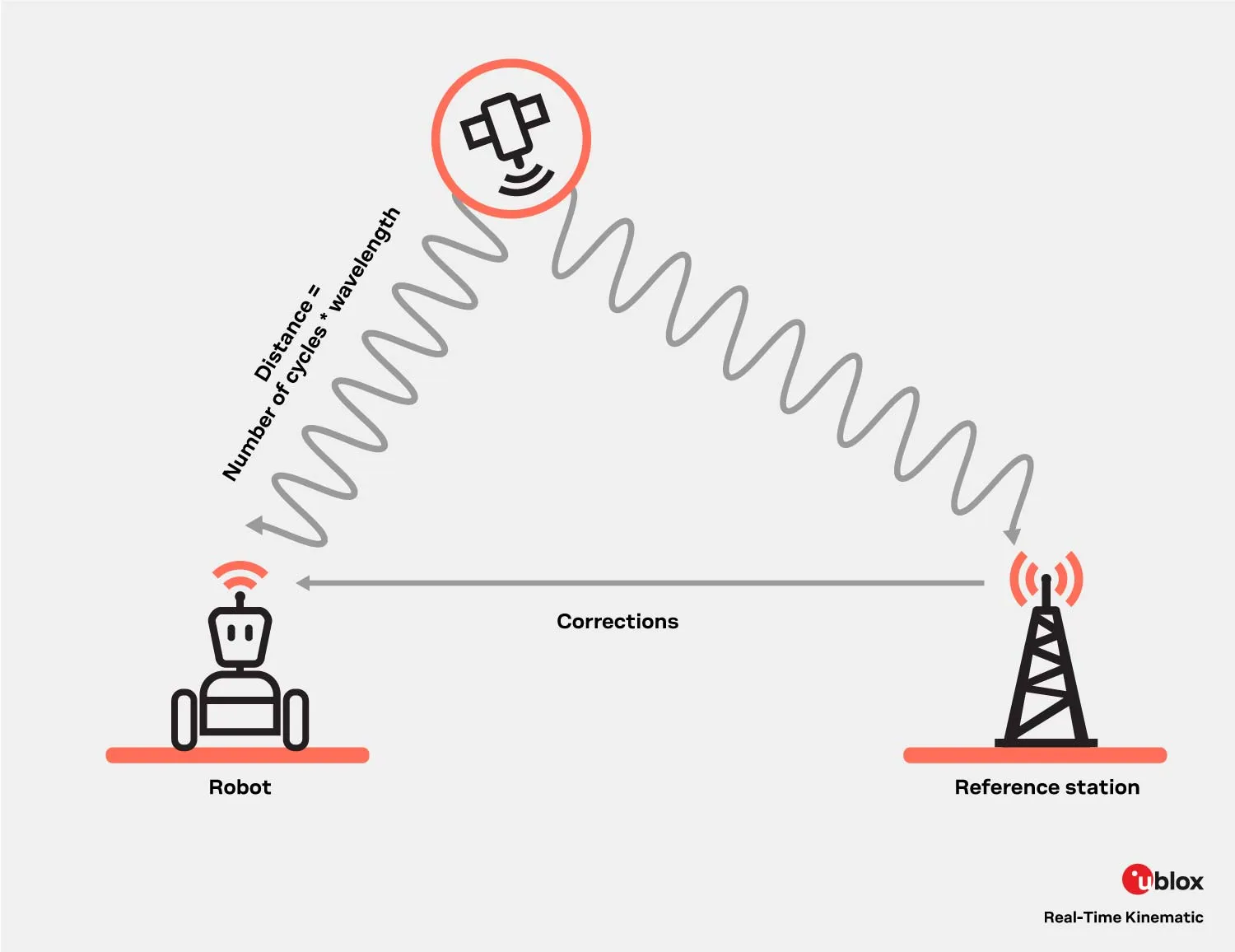
GNSS/RTK 是增强项。普通 GNSS 通常是米级,RTK fixed 好的时候可以到厘米级,但乘用车不能假设它永远可用。城市峡谷、高架、树荫、隧道都会让它断、跳、漂。
这里的 fixed,指 RTK 把载波相位里的整周模糊度解成了固定整数解。简单说就是:系统非常确定自己解对了,所以精度能到厘米级。相对的是 float,模糊度还没完全固定,精度和可信度都要打折。
RTK 更适合开阔低速场景,比如除草机、农机、园区无人车。北美大 House 的草坪机器人用 RTK 很合理,天无遮挡,还能布基站。扫地机一般不靠 RTK,因为室内本来就没 GNSS。
融合的过程是怎样的?
可以粗暴理解成 Kalman Filter 的两步:预测,校正。
预测靠 IMU。上一帧的位置、速度、姿态,加上角速度和加速度,推到下一帧。它顺滑、高频,但会漂。
校正靠外部观测。轮速说你这段只走了这么多,GNSS/RTK 说你大概在这个全局位置,地图或视觉说你应该贴近这条车道线、这个车位角点。滤波器根据可信度,把状态往更合理的位置拉。
工程里不会只用最基础的 KF。车辆运动和姿态都是非线性的,所以常见是 EKF;惯导融合里更常见的是 ESKF,也就是误差状态卡尔曼滤波。UKF 也能用,但它不等于一定更准。
真实项目里,精度上限往往不是滤波器名字决定的,而是 IMU 等级、轮速精度、时间同步、外参标定、RTK 状态和多路径质量决定的。算法救不了烂数据。
融合定位与SLAM建图
融合定位和 SLAM 不是替代关系,更像互相喂信息。
融合定位能给 SLAM 一个更好的初始位姿,让特征匹配、车位角点关联、回环检测的搜索范围更小。反过来,SLAM、地图匹配、视觉语义特征也能把漂掉的 DR 拉回来。
我在上汽做泊车算法时,这点感受很明显。地库里车位检测出来后,要放到统一坐标系里持续维护。车绕一圈回来,如果融合定位够稳,同一个车位和之前记录的车位重叠度还是很高,补偿就顺;如果 DR 漂得厉害,车位会一层一层叠偏,后面规划和泊入都会难受。
所以一句话:RTK 提供精度,IMU 提供连续性,轮速提供车辆运动约束,Kalman 系列滤波负责按可信度把它们揉在一起。智能驾驶要的不是某一秒特别准,而是每一秒都稳定、连续、知道自己什么时候不准。